Cup Tower Build
| Python | ROS | MoveIt | ApriTag | Baxter |
Examples
Below are some videos of states 1 & 2 for different number of cups. Videos are speed up by 6 times.
Fig.1 3 Cups

Fig.2 6 Cups
Fig.3 10 Cups
Description
The goal of the project is to use robot Baxter and build a tower of cups.
This was a team project. The names of the team are :
Dimitrios Chamzas
Dongho Kang
Sonia Lai
Gabbie Wink
My contribution to this project was mainly at the robotic manipulation part(grasping, placing the cups) but also lead the team on how we should approach each part of the project.
Overview
In order to build the tower of cups we split the algorithm into 2 main states.
Our environment is a table in front of the robot with cups on it in random positions.
Baxter has to use both his hands and place all the cups at the side of the table(figure 4).
After all the cups are at the side of the table Baxter has to pick each cup again and build the tower(figure 5).
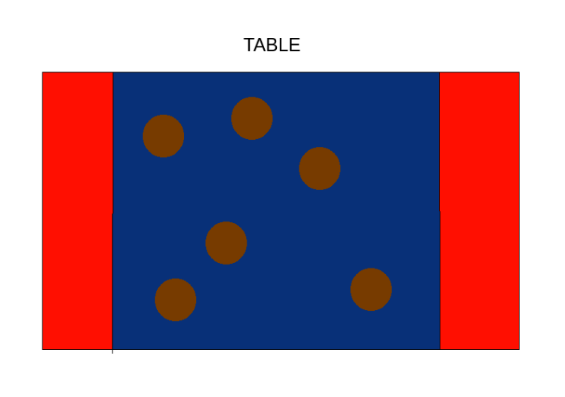
Fig.4 STATE 1
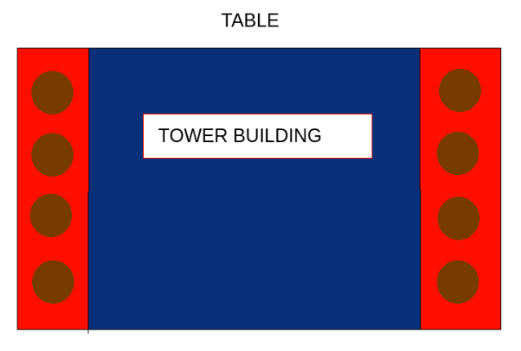
Fig.5 STATE 2
For the position detection of each cup we used ROSaprilTag package. Baxter is equipped with 3 cameras, one at his head and one on each arm. We used the cameras that are at the arms of the robot(figure 6).
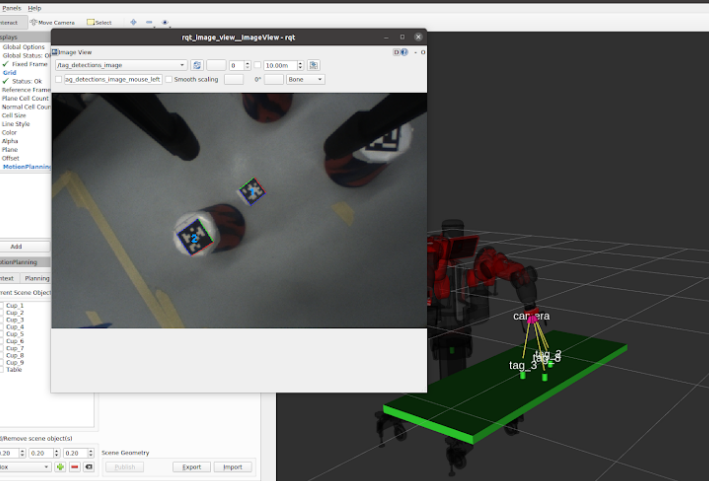
Fig.6 AprilTag Detection
For path planning we used MoveIt package and cartesian planner. In order to avoid collision with the cups or the table the whole enviroment has been added at the rViz enviroment(figure 7).
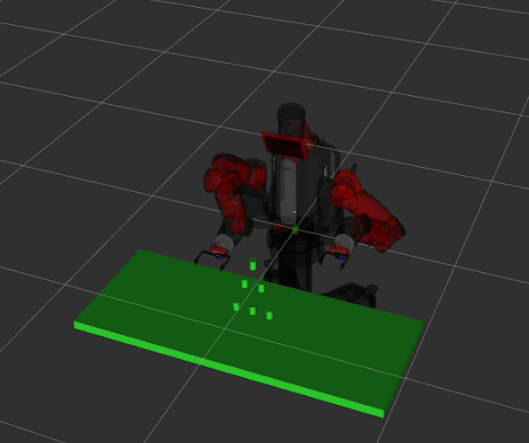
Fig.7 rViz sceneray