TurtleBot SLAM
Python | ROS | SLAM | Autonomous Exploration | AMCL | Frontier Exploration|
Demonstration of Autonomous Exploration
Description
In this project, The goal is to use the turtlebot to map an environment and then navigate within the map using the slam_toolbox. Also an autonomous exploration algorithm was implemented for the creation of the map.
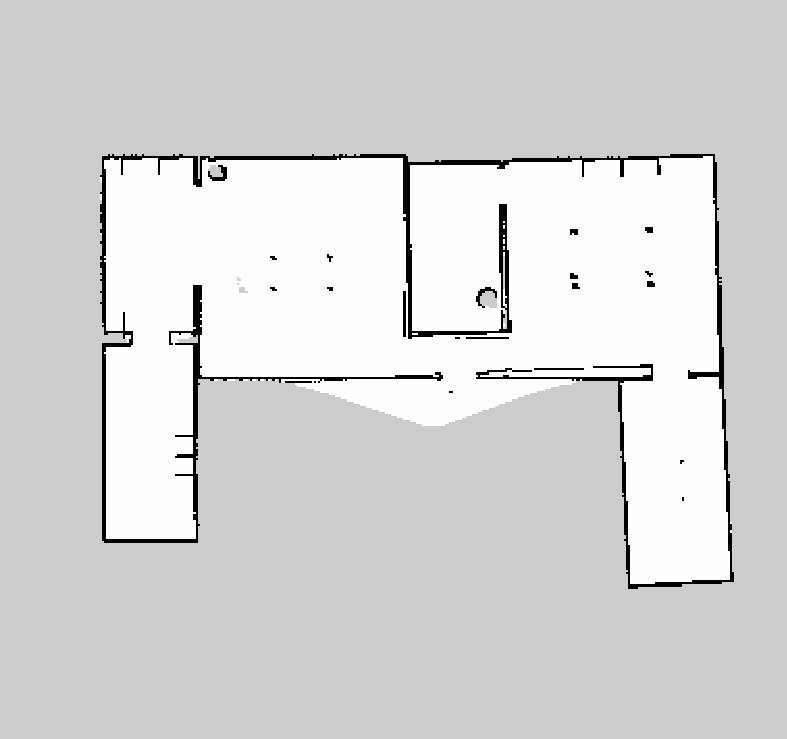
Fig. 1 mapping of Gazebo House
Overview
The basic idea is that we are navigating the turtleBot in order to explore and create a map of the environment. While we are using the amcl algorithm for SLAM. After we have created the map we are able to navigate free in the environment with optimal paths. Another implementation was made where we used the Frontier Exploration to create an autonomous exploration algorithm. The Algorithm navigates by itself and stops when no more frontiers are found in the environment. Experiments were made using both the Gazebo Simulator and the actual turtleBot.
Fig 2 turtleBot SLAM
At figure 2 we are using Gazebo House environment to navigate, explore and map the enviroment.
Results
Below we see our algorithm implementation at different scenarios

Fig 3 actual turtleBot SLAM
At figure 3 we are using the actual turtleBot to navigate and create a map of my house.
Fig. 4 navigation in explored environment
At figure 4 we see the turtleBot navigating in an environment(Gazebo House) that has been already explored.
Fig. 5 Autonomous Exploration