3D Augmented Reality Tangible User Interface using Commodity Hardware
Augmented Reality | OpenCV | Unity | Computer Vision | 3D Tracking | 3D Registration |
This project is part of my thesis. It was published as a paper at conference GRAPP 2020.
Abstract:
During the last years, the emerging field of Augmented & Virtual Reality (AR-VR) has seen tremendous growth. An interface that has also become very popular for the AR systems is the tangible interface or passive-haptic interface. Specifically, an interface where users can manipulate digital information with input devices that are physical objects. This work presents a low cost Augmented Reality system with a tangible interface that offers interaction between the real and the virtual world. The system estimates in real-time the 3D position of a small colored ball (input device), it maps it to the 3D virtual world and then uses it to control the AR application that runs in a mobile device. Using the 3D position of our “input” device, it allows us to implement more complicated interactivity compared to a 2D input device. Finally, we present a simple, fast and robust algorithm that can estimate the corners of a convex quadrangle. The proposed algorithm is suitable for the fast registration of markers and significantly improves performance compared to the state of the art.
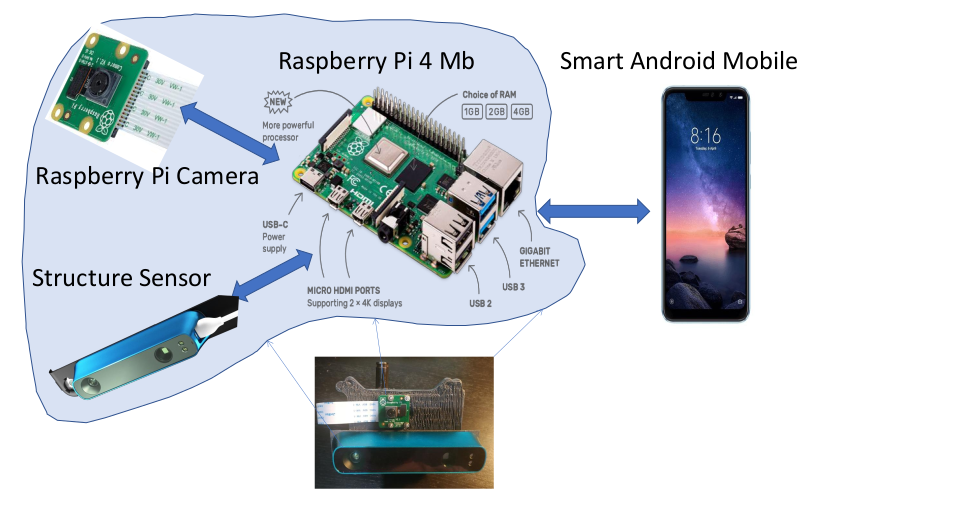
Hardware
The first subsystem implements Tracking and Display, and it contains an Android mobile phone (Xiaomi Red-mi Note 6 pro) running a 3D Unity Engine with Vuforia where by utilizing an ”image target” the front camera projects the augmented environment on our screen. The second subsystem implements the 3D tangible AR User’s interface (TUI) and it consists of a Raspberry Pi 4 with an RGB Raspberry Camera and a depth camera (Structure Sensor) housed in a home- made 3D-printed case.
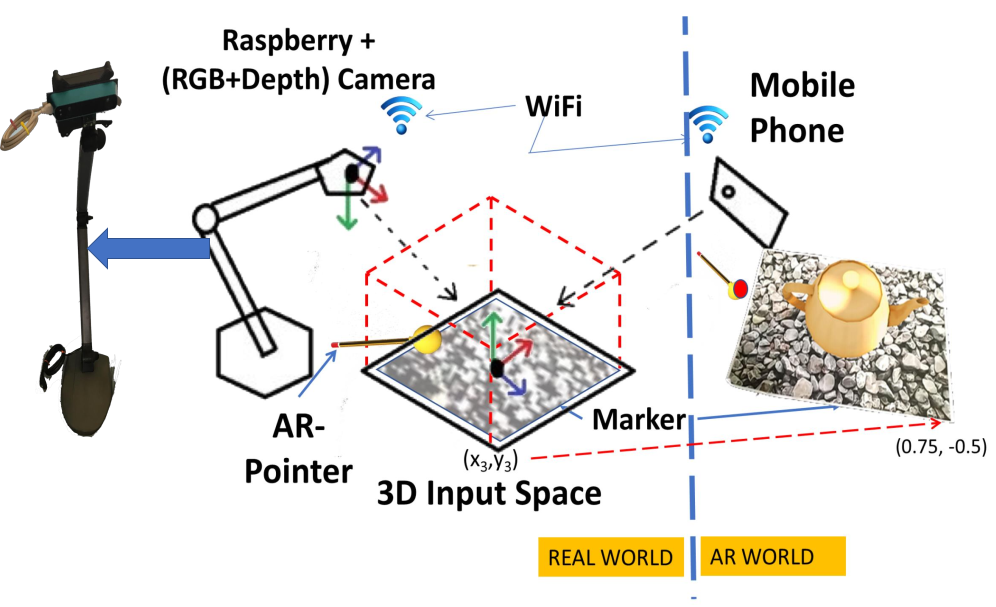
The AR system
An illustrative example of the setup of our system in the real world is shown in the image above. As it was described our system is composed of two different subsystems. The first subsystem, the mobile phone, is responsible for the visualization of the Augmented Reality environment. The virtual objects are overlaid on a predefined target image printed on an A4 paper. Thus the mobile phone is responsible for graphics rendering, tracking, marker calibration, and registration as well as for merging virtual images with views of the real world. The second subsystem is attached to a ”desk lamb arm”, and faces the target image. This system is responsible to align the images from the two cameras, locate the 3D coordinates of a predefined physical object(yellow ball), namely the AR - POINTER , transform its XYZ coordinates to Unity coordinates and send them to mobile via WiFi. The physical pointer, which has a unique color, is localized via an adaptive color and distance camera registration algorithm. The physical AR - POINTER has its virtual counterpart in the AR world, a virtual red ball, which represents the real 3D input device. Thus, by moving the real AR - POINTER in the real 3D world, we move the virtual AR - POINTER in the virtual world, interacting with other virtual objects of the application. This is a tangible interface, which gives to the user the perception of a real object interacting with the virtual world.